Importance of units
- DP Event
- Published on 11 August 2022
- Generated on 26 April 2025
- DPE 02/22
- 3 minute read
Incident
A mix-up between feet and metres leads to DP systems becoming critically unstable.
Overview
Upon completion of DP field arrival trials, the vessel began sub-sea operations. One ROV was deployed and the crane was in use subsea. The vessel set the two stern thrusters AZI1 and AZI2 to bias, in addition the bow drop-down thruster AZI3 was set to bias mode.
Biasing was set at 0.5t with a turn factor of 50%. The vessel lost position due to stern thrusters oscillating thrust against each other, ramping up to over the 50% turn factor causing them to kick into variable mode.
An all stop was called and the crane and ROV’s were recovered to deck. The stern thrusters continually circled around their azimuths, unable to meet their set points. The stern thrusters continued to increase their thrust up to 100% causing the bow thrusters to ramp up as well. The excess thrust increased the demand on the available generators on each side of the bus (open bus), starting the two remaining standby generators. Vessel heading was lost by five degrees, and the position up to 10m.
The DPO then disengaged the sway axis to allow the thrusters to settle down. Control of Sway was kept by joystick command. Once stable, the DPO put the thrusters back into biasing and reengaged the sway axis. The vessel then stabilised and kept position until the ROV and Crane were back on deck.
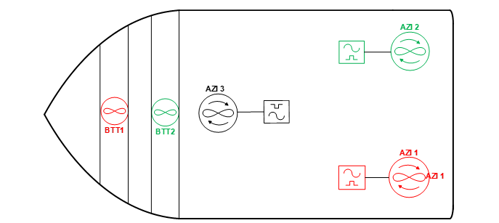
Figure: Thruster setup
Events leading up to the incident
The vessel owner was requested by the charterer to use metres as distance units for DP Control, the DPO then changed all DP parameters from feet to metres to suit.
An on-coming DPO then changed offset values from their correct value in metres to feet believing that feet were the correct value for the DP Control System. However, the DP system was still selected to operate in metres.
As the vessel heading became less stable as environment increased the DGNSS positions were less accurate and the DP system became critically unstable.
What can be concluded?
- Poor management of change, logging of system settings, handovers, etc.
- Poor Communication.
Additional comments
- It is unclear why the DPO did not deselect the bias mode when the thrusters began to ramp up.
- It is unclear what the environmental forces were in the lead up to the event. Bias mode is often chosen for light environmental conditions to prevent the azimuth thrusters ‘hunting’ however this mode is not generally suitable for higher environmental conditions.
- The event report did not mention the use of ASOG. An ASOG would have assisted in the decision making process whether in an increasing environmental situation or in which modes to operate in and when.
- The units of measurement can be changed for the HMI presentation within the DP controller. This is a selection available to the DPO. The DP controller accuracy and quality is not influenced by the units chosen. The variable settings for the DP controller are set.
Latest DP incidents
-
Thorough preparation is key
With 4 of 8 diesel generators running and connected to a closed ring bus, and 7 of the 8 thrusters selected to DP, a DP equipment class 3 MODU was set up in Green mode whilst on standby.
DPE 03/24
5 November 2024
Incident
-
There – but not really there
This DP event occurred on a DP equipment class two supply vessel whilst carrying out cargo operations on the starboard side alongside the asset and working at the lee side in the drift-off position.
DPE 03/24
5 November 2024
Incident
-
Equipment Class 3, even if you operate as 'Class 2'
This case study examines a DP incident on an equipment class 3 multi-purpose vessel while operating in good conditions.
DPE 03/24
5 November 2024
Incident
-
Line of sight
This case study covers events onboard a DP equipment class 2 vessel whilst holding position in a turbine field, with three position reference systems selected into DP – DGPS, HPR and Fanbeam.
DPE 03/24
5 November 2024
Incident
-
DP Drill Scenario
DP emergency drill scenarios are included to assist DP vessel management, DPOs / Engineers, and ETOs in conducting DP drills onboard.
DPE 03/24
5 November 2024
Incident
The case studies and observations above have been compiled from information received by IMCA. All vessel, client, and operational data has been removed from the narrative to ensure anonymity. Case studies are not intended as guidance on the safe conduct of operations, but rather to assist vessel managers, DP operators, and technical crew.
IMCA makes every effort to ensure both the accuracy and reliability of the information, but it is not liable for any guidance and/or recommendation and/or statement herein contained.
Any queries should be directed to DP team at IMCA. Share your DP incidents with IMCA online. Sign-up to receive DP event bulletins straight to your email.